4本足ロボットできたかな?
2023年10月6日(金)は、7割ほどの出席率でした。
- 18時00分~18時25分 タイピング練習
- 18時25分~18時55分 input関数とprint関数のおさらい、その他
- 18時55分~19時00分 5分休憩
- 19時00分~19時50分 各自の課題
- 19時50分~20時00分 あとかたづけ
出席率は平均して7割くらいです。よく聞かれるのが、「毎週行かなければなりませんか?」という質問です。学習塾ではなく、クラブ活動ですので、自分のペースで来て構いません。料金は来た分だけお支払いください。
ついていけなくなるかも、と心配されることもあります。クラブ全体で進む足並みをそろえているわけではないので、安心してください。進みの速いメンバーには難しい課題を、進みの遅いメンバーにはやさしい課題をしてもらいます。なかには、自分のレベルを遥かに超えた難しい課題に挑戦するメンバーもいます。
ただ、マンツーマンでずっとわたしが見られるわけではありません。わたしでもすぐに解決できない課題を、メンバーがもってくることがあります。その対応中は、どうしても他のメンバーは手薄になります。その点、ご理解とご協力をお願いします。
タイピング練習
今回のタイピングの練習は、英語入力です。使う教材は、下のサイトのWebアプリです。
https://manabi.benesse.ne.jp/gakushu/typing/
毎回の賞品をどのように決めているかというと、わたしの気分です。そして、コープミニ テクノポリス店の応援のために、必ず同店で買えるものにしています。それから、効果がないと感じたら賞品をやめるかもしれません。わたしはわたしなりに、クラブ全体の最高の効果がでるように試行錯誤しながら取り組んでいます。
各自の課題
各自の課題は、ものづくりチームとゲームづくりチームに分かれて取り組みます。
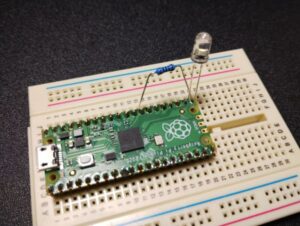
4本足のロボットをサーボモーターで動かす
サーボモーターは、軸が回転する角度を精密に制御できるモーターです。
動物が動くときの足の角度は、歩くスピードを変えなければ、一定の範囲で行き来します。となれば、サーボモーターを4つ使えば、かんたんな4本足ロボットが作れるのではないか? というのが発端でした。

優秀なメンバーなので、しばらくほったらかしにしていたら行き詰まっていた様子。これはわたしの反省点です。
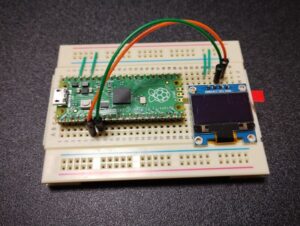
さて、わたしが課題と考えていたのは、サーボモーターの電力供給です。サーボモーター1個を無負荷で動かすならば、ラズPico直結で問題ないでしょう(とはいっても、恒常的に動かすのはNG、あくまで一時的に動かすときの話です)。しかし、4個のサーボモーターを負荷をかけて動かすとなると、ラズPicoが壊れかねません。
厳密に検証するなら、データシートを見て、サーボモーターの動作電流を測定します。が、それはもっと高度なロボットを作るときでよいでしょう。単純に動作電源を外部電源から取ります。
結線替えが終わったら、あとは足を動かすタイミングをプログラムで制御するだけ。乱暴に言うと、下記を繰り返すだけのプログラムです。
- 右前足と左後足を動かす
- 左前足と右後足を動かす
わたしがサンプルで示したのは、動作と動作の待ち時間を1秒としました。はたして1秒で良いかは、これからの動作検証次第です。プログラムコードは、メンバーが許してくれれば公開します。
出来上がりが見えてきたところで、目下の改良点は、足に滑り止めをつけることです。つけ方次第で、前に進むかどうか決まりそうだと考えています。このあたりは、ハードを作りながら試行錯誤するところです。
わたしも完成が楽しみです。