光都ICTクラブ(2025年12月)~キューブLEDはんだ付けとモーター制御~
金曜日は、毎週(第五金曜以外)光都ICTクラブの定例会が開催中です。メンバーみんなが、それぞれ課題を持ち寄って取り組んでいます。
ひたすらLEDをはんだ付け
キューブLEDを作るには、ひたすらLEDをはんだ付けしてきます。LEDは512個あります。
プラスとマイナスを間違えないように曲げて、はんだ付けしていきます。そして、写真は動作確認をしているところです。
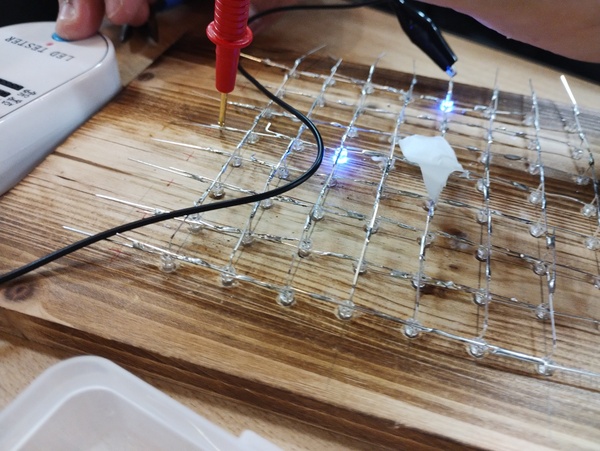
正しくは1箇所だけ点灯するはずなのに、正しくない場所が2カ所点灯しています。これは、回路のどこかが間違って接触している証拠です。目視しながら接触箇所を修正していきます。
ここが大変なところです。ひたすら地道な作業が続きます。
普段は水曜日のメンバーも
当日になって「行ってもいいか」と連絡あり。もちろんOK。
何を始めるのかと思ったら、自分のテーマがあって、それを進めている模様。

さまざまなプログラムの要素を学んできたので、自分で見つけたテーマにプログラムを応用できないか思いつくようになった様子です。
倒立振子のためのモーター制御
倒立振子を作るメンバーは、モーター駆動で行き詰まっている様子です。回路は正しいのに動きません。写真は、モーターに届く電圧を確認しているところです。ここの電圧がほぼ0Vで、みんなで悩んでいます。
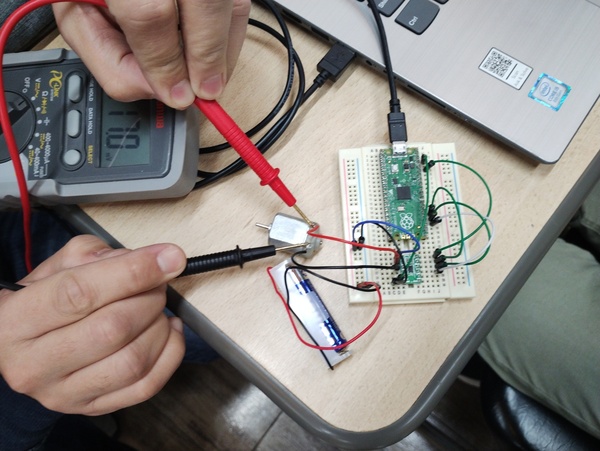

ジャンパー線の導通を確かめて、ラズPicoを変えてみて、モータードライバーを変えてみて、モーターを変えてみて。
アレヤコレヤと試しながら、原因箇所を探っていきます。結局、原因は電圧不足でした。電池を2個にしたら、モーターが勢いよく動き出しました。

モーダードライバーの仕様書通りなら、電池一個で問題ないはずです。ただし、接触箇所の抵抗や、デバイスの個体差で電池一個1.5Vだと足りなかったのでしょう。あるあるです。
次は、傾きセンサーと組合せて動作させよう
モーターが動いたら、次は傾きセンサーと合わせて動作させましょう。倒立させる動作は置いといて、まずは垂直から傾いたらモーターが回るように作ってみましょう。

